Dies ist eine Übersetzung des ursprünglichen englischen Artikels.
Santa Clara, Kalifornien, 26. August 2025, Chainwire
Auf dem ADAS & Autonomous Vehicle Technology Summit Nordamerika gab ROVR, ein führendes dezentrales physisches Infrastrukturnetzwerk (DePIN), das die Grundlage von Spatial AI bildet, stolz die Einführung des ROVR Open Dataset bekannt — einem hochauflösenden, multimodalen Datensatz, der entwickelt wurde, um Innovationen in Spatial AI, autonomem Fahren, Robotik und digitalen Zwillingen voranzutreiben.
Diese Veröffentlichung bei einem der wichtigsten Branchentreffen unterstreicht ROVRs Engagement zur Unterstützung des Ökosystems autonomer Fahrzeuge mit offenen, hochpräzisen Daten, um die nächste Generation intelligenter Mobilitätslösungen anzutreiben.
Der Datensatz markiert einen bedeutenden Meilenstein in ROVRs Mission, den Zugang zu hochwertigen, realen Daten zu demokratisieren und die nächste Generation KI-Modelle zu entfesseln, die physische Räume verstehen und mit ihnen interagieren.
Eine menschenzentrierte Sicht auf die Welt
Im Gegensatz zu traditionellen Datensätzen, die sich rein auf Maschinensehen konzentrieren, erfasst das ROVR Open Dataset die Welt, wie sie von menschlichen Fahrern gesehen wird — einschließlich dessen, was sie sehen, wie sie sich bewegen und wie sie mit ihrer Umgebung interagieren.
Gesammelt mit ROVRs maßgeschneiderten mobilen Wahrnehmungseinheiten — betrieben von einem globalen Netzwerk von Mitwirkenden — ist der Datensatz Teil einer langfristigen Anstrengung, den weltweit größten offenen Fahrdatensatz aufzubauen, mit einem Ziel von 1 Million 30-Sekunden-Clips.
Jeder Clip enthält:
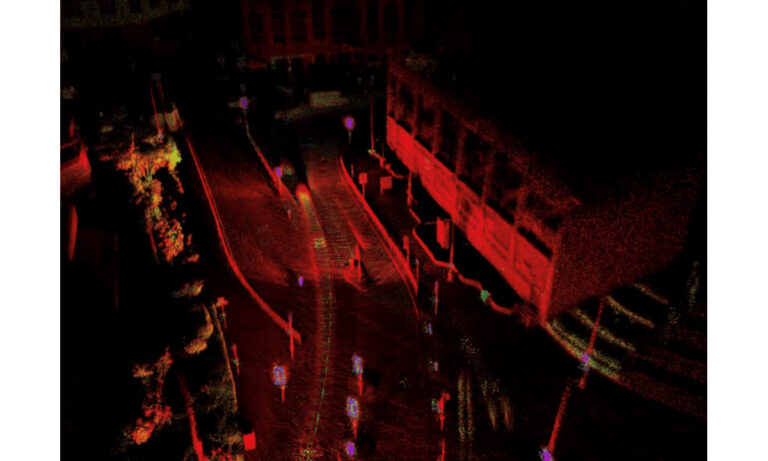
- Roh-LiDAR-Punktwolken für detaillierte 3D-Räumliche Rekonstruktion
- Hochauflösendes RGB-Video von frontalen Dashcams
- Hochfrequente IMU-Daten, die die Bewegungsdynamik erfassen
- Zentimeter-genaue RTK-GPS-Lokalisierung für präzise Bodenwahrheit-Positionierung
- Anonymisierte Szenen für datenschutzkonforme und ethische KI-Entwicklung
Die erste öffentliche Freigabe umfasst 1.500 vollständig synchronisierte Clips, die insgesamt mehr als 1 TB Daten ausmachen. Diese Clips bieten eine vielfältige Abdeckung städtischer, vorstädtischer und Autobahn-Umgebungen — einschließlich Baustellen, Schulüberquerungen, Verkehrsstaus und dynamischer Fußgängerszenen.
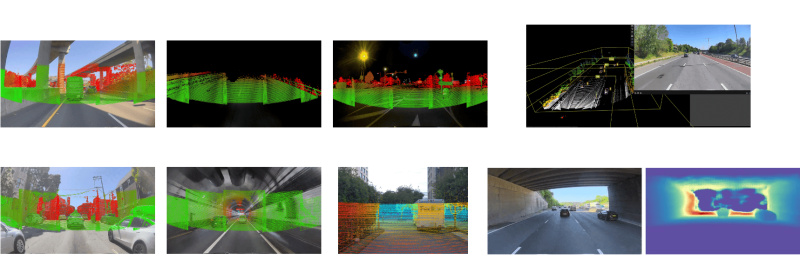
Über die Rohsensordaten hinaus baut ROVR auch eine skalierbare Annotierungs-Pipeline für semantische Segmentierung, Objekterkennung, Szenenverständnis und Absichtsvorhersage auf — was es Forschern und Ingenieuren ermöglicht, nächste Generation Foundation-Modelle für Spatial AI zu trainieren.
Zukünftige Versionen des Datensatzes werden Folgendes beinhalten:
- Von Menschen annotierte 2D/3D-Bounding-Boxes, semantische Labels und Verhaltenshinweise
- Erstellung von Szenengraphen, um die räumlichen und zeitlichen Beziehungen zwischen Objekten zu erfassen
- Aktions- und Absichtshinweise zur Verwendung in Verhaltensmodellierung und Lernpolitik
- Domain-Diversitäts-Metadaten zur Unterstützung der Verallgemeinerung über Geografien und Grenzfälle
Diese Funktionen sind so konzipiert, dass sie eine breite Palette von innovativen Anwendungen unterstützen, einschließlich:
- Autonomes Fahren und Routenplanung
- Roboternavigation und SLAM-Benchmarking
- AR/VR-Raumwahrnehmung und Einschlussbeurteilung
- Multi-modale große Modell (VLM, VLM+3D) Vorabtraining
- Erstellung digitaler Zwillinge für intelligente Städte und Infrastruktur
Das ROVR Open Dataset ermöglicht es Forschern, Entwicklern und Institutionen, nächste Generation KI-Modelle zu trainieren, zu bewerten und bereitzustellen, die sicher und intelligent in der realen Welt arbeiten können. Durch die offene Bereitstellung des Datensatzes zielt ROVR darauf ab, Zusammenarbeit, Reproduzierbarkeit und Transparenz innerhalb der globalen KI- und Robotik-Communities zu fördern.
Warum jetzt und warum offen
Die Einführung beim ADAS & AV Technology Summit Nordamerika erfolgt zu einem Zeitpunkt, an dem Wahrnehmung und Verständnis der realen Welt als die nächsten großen Grenzen der KI-Entwicklung auftauchen.
Im vergangenen Jahr haben Foundation-Modelle das Verständnis von Sprache und Bildern revolutioniert — aber Spatial AI bleibt erheblich unterentwickelt, hauptsächlich aufgrund der Knappheit an großflächigen, hochwertigen Datensätzen aus der realen Welt.
Wahrnehmung entsteht schnell als die nächste Grenze der KI. Zu verstehen, wie Menschen die physische Welt in Echtzeit und über verschiedene Umgebungen hinweg navigieren und interpretieren, ist entscheidend für den Aufbau robuster, generalisierbarer KI-Systeme. Im Gegensatz zu statischen Karten oder synthetischen Umgebungen bietet die multimodale Realität die Vielfalt, Ambiguität und Komplexität, die KI meistern muss, um sicher und intelligent arbeiten zu können.
Das ROVR Open Dataset bietet eine neue Perspektive auf menschliche Navigation und Umweltbewusstsein und überbrückt die Kluft zwischen Simulation und Intelligenz auf Straßenebene. Durch die offene Bereitstellung dieses Datensatzes zielt ROVR darauf ab, Forscher, Entwickler und diejenigen zu befähigen, die in den Ökosystemen für KI, Robotik und intelligente Infrastruktur arbeiten.
Der Datensatz wird unter einer erlaubenden Lizenz für nicht kommerzielle Nutzung veröffentlicht, mit zukünftigen Plänen, erweiterte Versionen — einschließlich vollständiger Sequenzen und dichter Annotationen — kommerziellen Partnern zur Verfügung zu stellen. Diese Initiative spiegelt ROVRs Engagement für offene Infrastruktur, kollektive Intelligenz und die verantwortungsvolle Entwicklung realer KI-Systeme wider.
Von der DePIN-Community aufgebaut
ROVR wird von einem dezentralen Netzwerk von Mitwirkenden unterstützt — Einzelpersonen und Flotten, die mit ROVRs Plug-and-Play-Datensammlungs-Hardware ausgestattet sind. Im Gegensatz zur zentralisierten Datensammlung durch große Tech-Unternehmen ist das Modell von ROVR:
- Skalierbar — Tausende von Mitwirkenden, die täglich wachsen
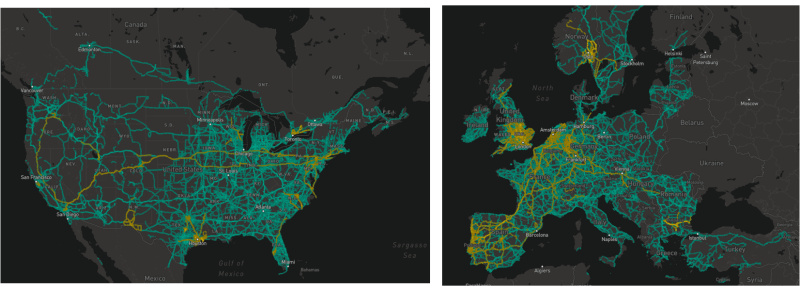
- Global — in Städten, Vororten und aufstrebenden Märkten
- Anreizorientiert — Mitwirkende verdienen Tokens für das Teilen verifizierter Daten
- Zusammensetzbar — ermöglicht die Integration in verschiedene KI-, AR/VR- und Robotik-Stacks
Dieser Community-orientierte Ansatz hat bereits zu über 20 Millionen Kilometern Straßenabdeckung und mehr als 3500 eingesetzten Geräten geführt, wobei die Nutzung zunimmt, während die Nachfrage nach Daten aus der realen Welt wächst.
 Von Daten zu Implementierung
Von Daten zu Implementierung
Über Rohdaten hinaus baut ROVR eine Full-Stack-Pipeline für Spatial AI auf, einschließlich:
- Intelligenz auf dem Gerät für effizientere Sammlung
- Cloud-basierte Annotationstools für flexible Etikettierung
- APIs und SDKs zur Integration des 3D-Weltverständnisses in KI-Systeme
- Partnerschaften mit Forschern, Startups und Unternehmen aus verschiedenen Sektoren
Die Einführung des Open Dataset ist der erste Schritt zum Aufbau einer gemeinsamen Grundlage für alle, die die KI-native physische Welt aufbauen — sei es in Form von selbstfahrenden Autos, Lagerrobotern, AR-Brillen oder intelligenten Städten.
Wie man auf den Datensatz zugreift
Das ROVR Open Dataset ist ab heute zum Download und zur Erkundung verfügbar.
https://rovr.network/#/dataset
Forscher, Entwickler, Pädagogen und Innovatoren werden ermutigt, sich dem ROVR-Ökosystem anzuschließen und die Zukunft von Spatial AI mitzugestalten.
Über ROVR
ROVR ist der Grundpfeiler von Spatial AI — ein dezentrales Netzwerk, das alltägliche Fahrzeuge in intelligente 3D-Karten der physischen Welt verwandelt. Durch eine globale Community von Mitwirkenden sammelt, strukturiert und verteilt ROVR großflächige 3D-Daten zur Nutzung in KI, Robotik, autonomem Navigieren und darüber hinaus.
Mit dem Glauben an offene Infrastruktur, faire Anreize und globale Inklusion baut ROVR die grundlegende Schicht für einen intelligenten, KI-ersten Planeten.
Medienkontakt: xinran.li@rovr.network
Um mehr zu erfahren:

Kontakt
COO
Xinran Li
ROVR Labs Inc.
xinran.li@rovr.network
 Bleib vorne in Crypto
Bleib vorne in Crypto